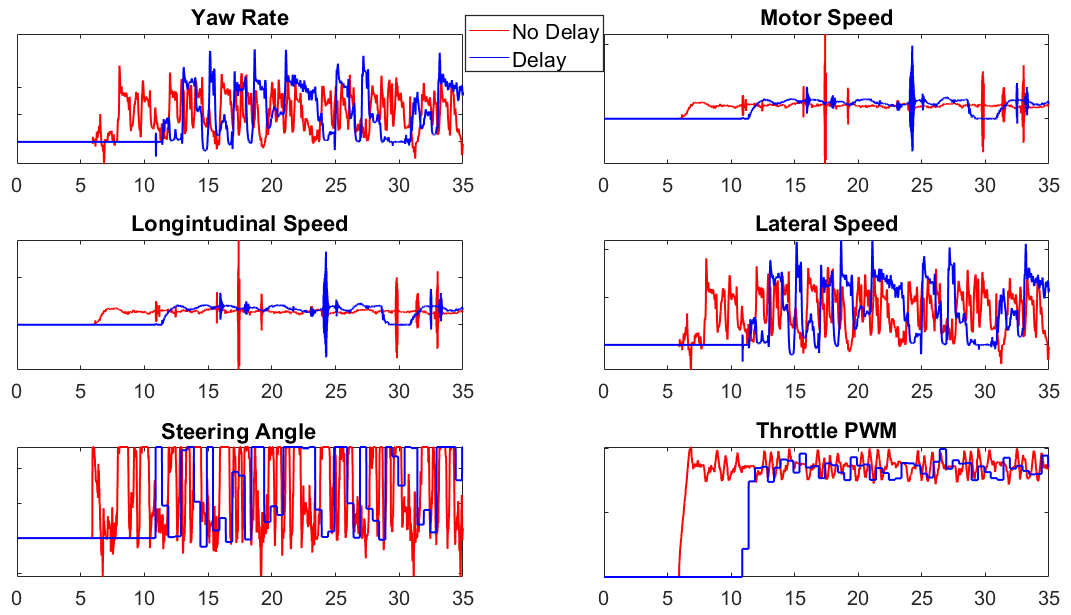
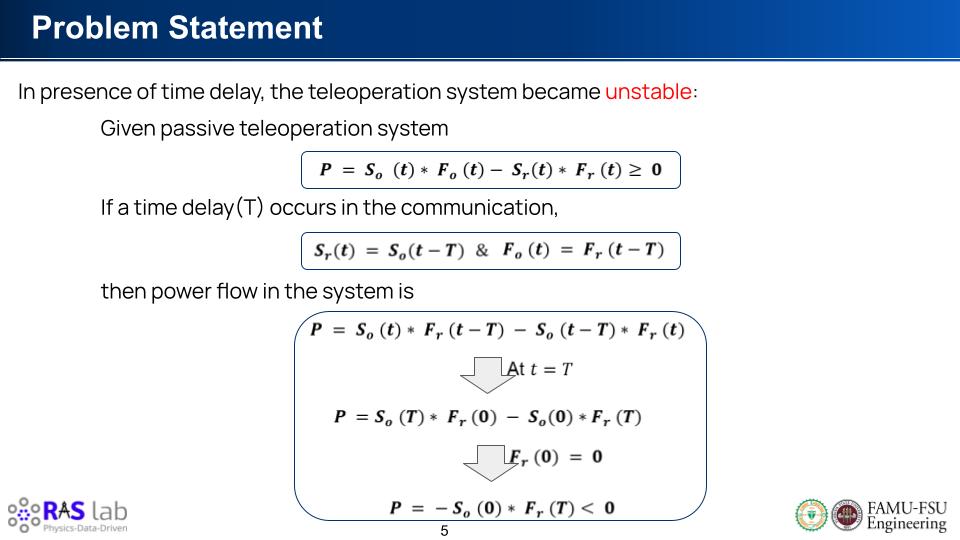
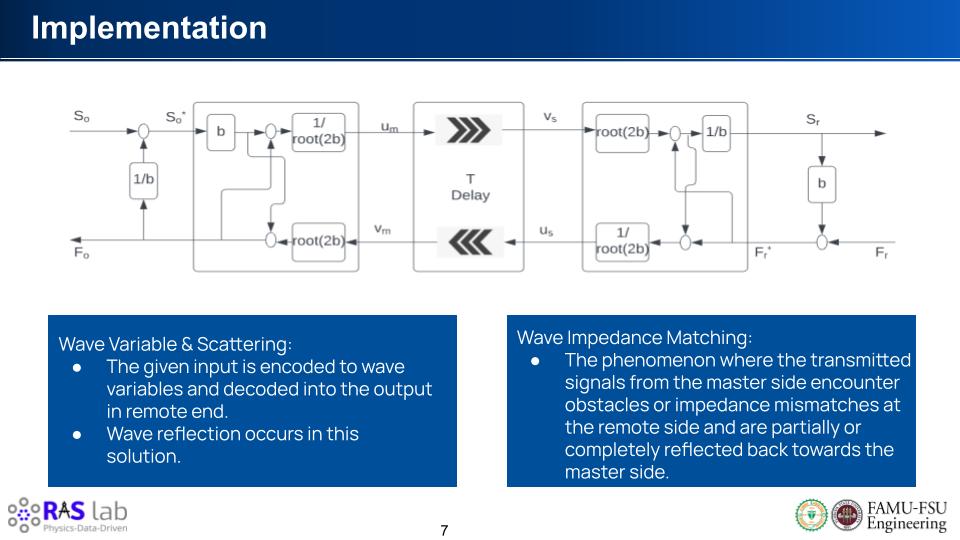
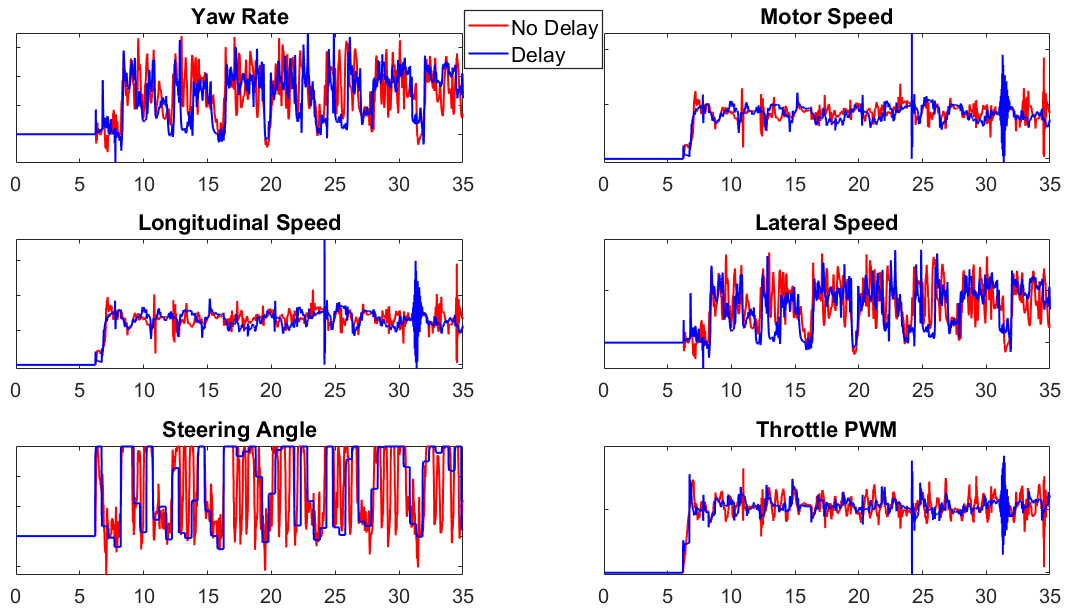
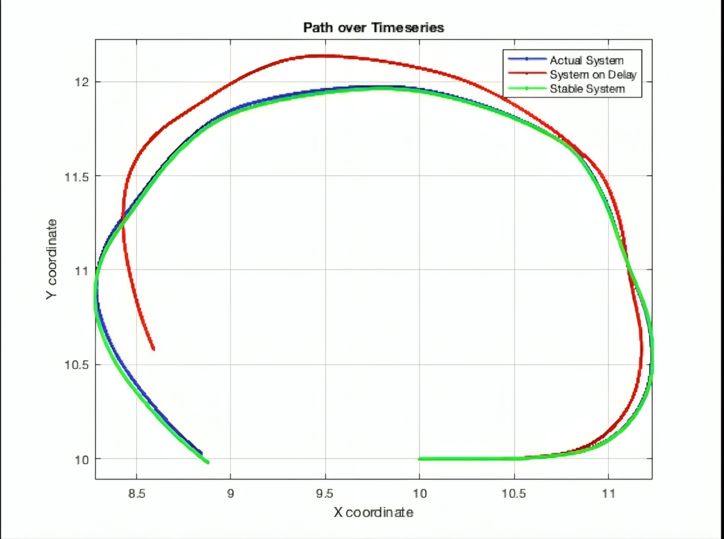
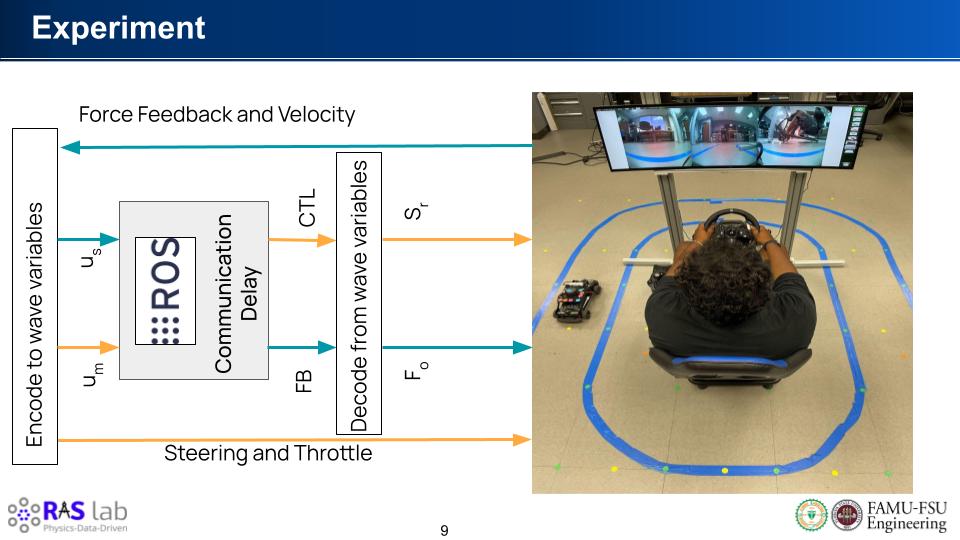
ROS | Gosling Car | G29 Gamepad | Passivity Analyzing the effect of delay and methods to overcome it. One of the biggest issues in human-controlled teleoperation systems is time delay in communication time. Even though ROS is one of the fastest communication frameworks, it causes delays of up to 70ms. I created a model to compensate for delays up to 500ms. The Story The delay in the system makes the system unstable which can be seen in above mentioned graph, where the delay imfacting input as well as output. Approach Using Wave variable and wave Scattering to overcome the delay issue. Wave variables are parameters used to characterize waveforms in teleoperation systems. Significance: Wave variables facilitate the analysis of signals transmitted between remote and operator sides. Scattering techniques involve the redirection or modification of signals to mitigate the impact of delays. Purpose: Scattering techniques help compensate for delays by adapting the transmitted signal characteristics. Result These implementations of wave variables and scattering in the problem statement, help us to overcome the time delay. The result is shown below… Share on