nkumarrajarajan@gmail.com I’m Naveen, an Embedded Engineer with a Master’s degree from Florida State University, where I completed my thesis on Teleoperation and Autonomous Systems. I have over 4 years of industrial experience and more than 5 years of professional experience. I am currently seeking new opportunities to further advance my career. 2023 – 2024 — Graduate Research Assitant — CAPS, FSU 2022 – 2024 — MS in Electrical and Computer Engineer from FSU 2018-2022 — Embedded / Backend Engineer – TCS 2014 – 2018 — Bachelor’s Graduate from Anna University 2017 – 2022 — Co-Founder — Smazee
— this is Naveen Kumar Rajarajan.
An Embedded Engineer Graduated.
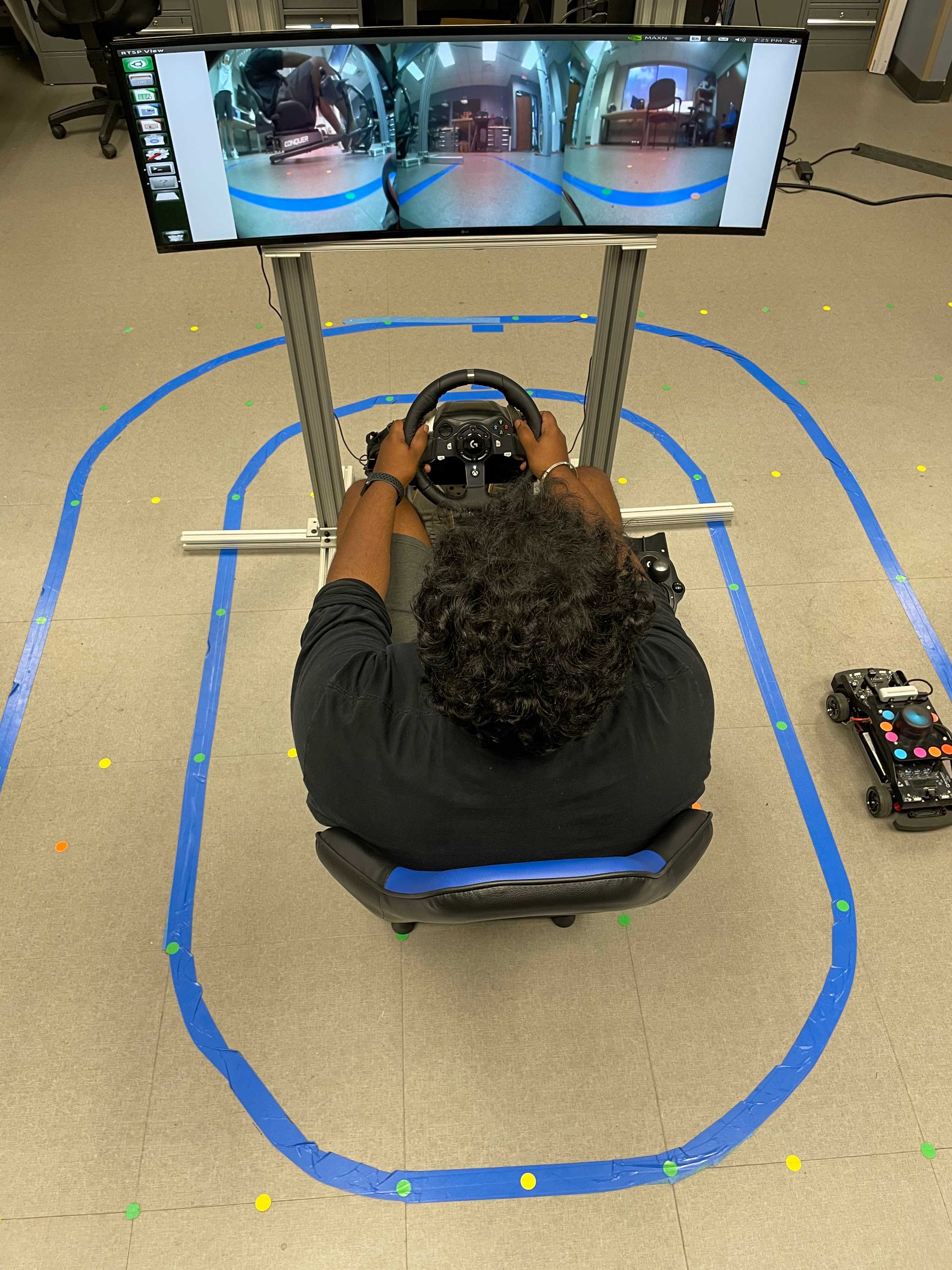
Hello, I’m Naveen, an Embedded Engineer with a Master’s degree from Florida State University, where I completed my thesis on Teleoperation and Autonomous Systems. I have over 4 years of industrial experience and more than 5 years of professional experience. I am currently seeking new opportunities to further advance my career.
I write code that powers what you see on the display and the systems that make the display work.
Naveen Kumar Rajarajan.
+1 850-(339) 8125
about me … about me …
about me … about me …

— this is Naveen Kumar Rajarajan.
— this is Naveen Kumar Rajarajan.
My Journal
Let’s talk Let’s talk
Let’s talk Let’s talk