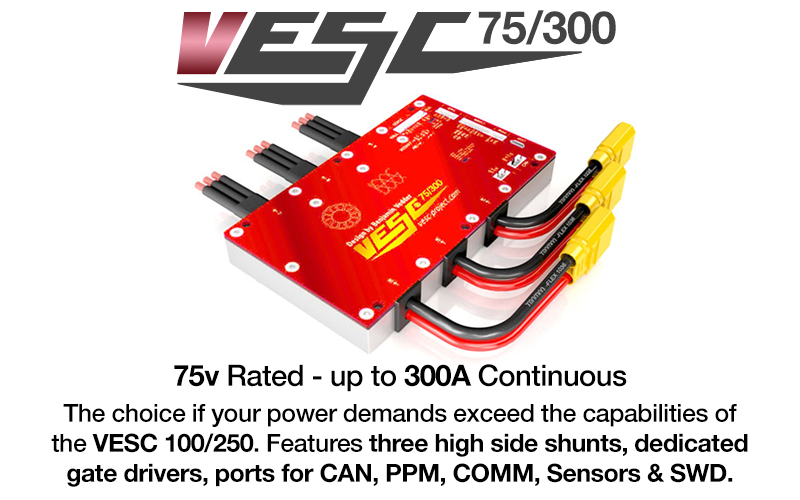
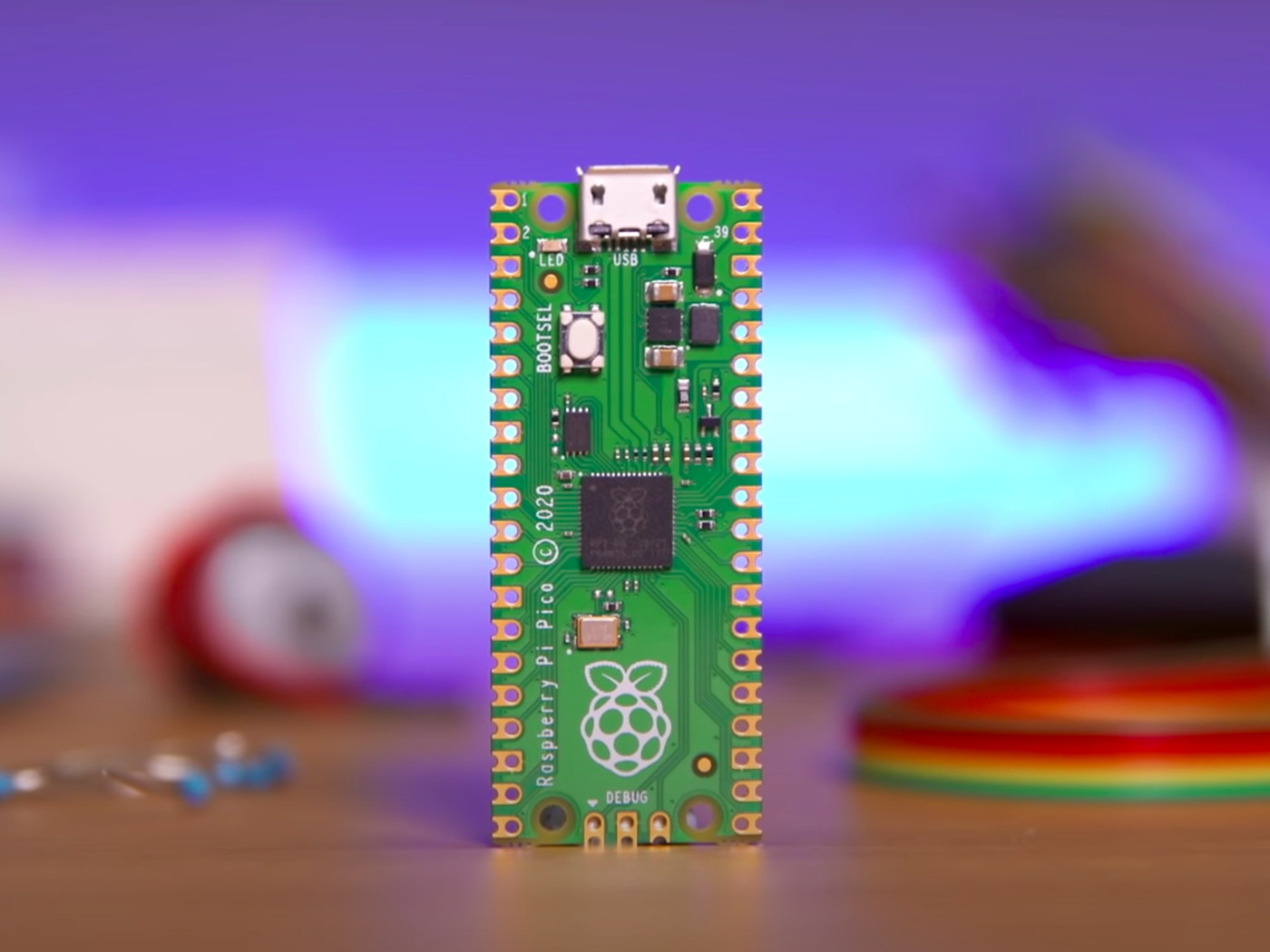
Building a GoKart completely autonomous with the help of Jetson, Camera, Lidar & ROS2. I predominantly worked on the middleware specifically ROS2 integration and SBW,DBW. Integrating the Software (Autonomous system) and the Hardware and establishing the communication between them. Controlling the hardware specifically the Steering, wheel, and brake with the software input will be the task. SBW – Steer by wire: Using the nema34 motor and driver to control the motor with the given input. DBW – Drive by wire: Using the Motenergy ME1718 motor and VESC driver for driving the vehicle. Micro-ROS – Using the low-level controller (Rpi picco) with the help of micro-ROS, the data is transferred between drivers and computers. By integrating SBW, DBW, and micro-ROS with the help of the low-level controllers, the autonomous system is implemented. Autonomous Go Kart

01 Problem
02 Approach
03 Solution
Device and Technology